transistor. Si bien este sistema funciona, genera gran cantidad de calor y perdidas de potencia.
Con este simple circuito se elimina ese problema controlando la velocidad de un motor DC mediante la
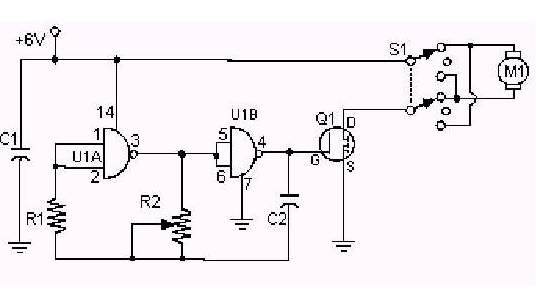
modulación por ancho de pulso.
Cuando más ancho es el pulso, mayor es la velocidad del motor y viceversa.
Materiales
R1 1 1 Meg 1/4W Resistor
R2 1 100K preset lineal
C1 1 0.1uF 25V Capacitor cerámico
C2 1 0.01uF 25V Ceramic Disc Capacitor
Q1 1 IRF511 MOSFET IRF620
U1 1 4011 CMOS NAND Gate
S1 1 DPDT Switch
M1 1 Motor (ver Notas)
Notas
1. R2 Ajusta la frecuencia del oscilador y por lo tanto la velocidad del motor M1.
2. M1 puede ser cualquier motor DC que opere a partir de los 6v y no consuma mas allá de la corriente
soportada por Q1. El voltaje puede ser incrementado conectando un voltaje mas elevado directamente al
switch S1 en lugar de usar los 6v que alimentan al circuito. (Asegúrese de no exceder el máximo voltaje
soportado por Q1)
4. Q1 de la lista de partes (IRF511) puede soportar un máximo de 5 amperes. Puede usar IRF620 para
manejar un máximo de 6 amperes
Probador de servomotores
Probador de Servos para Modelismo
Los servos para modelismo son pequeños mecanismos dotados de un motor DC, una
reducción por engranajes y electrónica todo integrado dentro de un diminuto gabinete
plástico. Estos servos son empleados para comandar las funciones de modelos en
miniatura de barcos, trenes, aviones y autos de carrera por medio de sistemas
radiocontrolados. La principal ventaja de los servos es que pueden ser controlados por
trenes de pulsos digitales. Pero esto se vuelve en contra cuando deseamos probar el
funcionamiento es estos motores.
Este circuito emplea un clásico de la electrónica conectado de tal forma de generar un
tren de pulsos ajustable por medio del potenciómetro del 10K. El transistor conectado a
las salida amplia la capacidad de manejo de corriente.
A medida que se gira el cursor del potenciómetro el tren de pulsos es modificado con lo
que se logra alterar el estado del servo el cual desplaza su eje en función del
potenciómetro. Es recomendable emplear un potenciómetro lineal, para que el efecto
sea igual en cualquier parte del recorrido del mismo.
El circuito debe ser alimentado con 6v de corriente continua.

Controlador para motor paso a paso
Partes
Parte Cant. Total Descripción Substitutos
R1, R2 ,R3, R4 4 1K 1/4W Resistor
D1, D2, D3, D4 4 1N4002 Diodo de silicio
Q1, Q2, Q3, Q4 4 TIP31 NPN Transistor TIP41, 2N3055
U1 1 4070 CMOS XOR
U2 1 4027 CMOS Flip-Flop
S1 1 SPDT Switch
MISC 1 Gabinete, pertinax , cables , Motor P-P
Notas
1. Cada vez que la línea STEP es pulsada , el motor avanza un paso.
2. S1 cambia la dirección del motor.

No hay comentarios:
Publicar un comentario